




Seymo angular gyro, for autopilots, with its advanced design INS (inertial navigation system), is an important part of auto navigation systems and inertial guidance in motorboats and sailboats. The instrument of this inertial guidance system includes gyroscopes and accelerometer.

Security policy (SSL visitor security of our website)

Shipping Policy (fast and secure)

Return Policy (within 14 days of receipt)

Description:
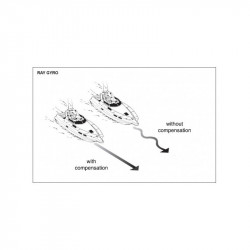
Autopilots respond to course through the reference of the compass but this is usually slow in difficult navigation conditions (following sea, wind, waves, etc ..).
Seymo angular gyro, for autopilots, with its advanced design INS (inertial navigation system), is an important part of auto navigation systems and inertial guidance in motorboats and sailboats. The instrument of this inertial guidance system includes gyroscopes and accelerometer.
Detecting rotational accelerations to which it is subjected when the boat is off course. by a wave, loading or sails.
These signals are fed to the course computer, which calculated continuously speed and exact address of ship navigation and using the computer algorithm, act quickly in compensation, causing the feeling that the ship is expected to waves, as if the really feel as if sail gliding on rails.
We verify how the system produces many short, precise corrections rather than large rudder movements. Keeping an accurate course, automatic yaw control with fast reaction to correct the course
AutoLearn, Advanced S teering T echnologie (AST), and Autotrim function, so the pilot automatically understands the vessel's steering characteristics, simplifying calibration and allowing the vessel to constantly adapt to changing sea conditions. Self learning variables as the boat (rudder gain, speed, trimer, etc ..)
Features + :
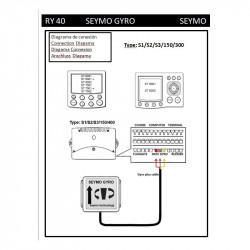
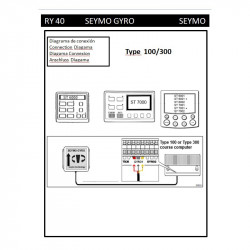
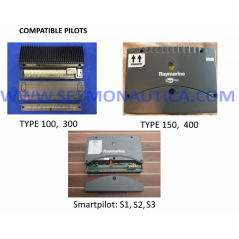
Compatible:
Raymarine:
Equivalent to all GyroPlus
Raymarine course computer:
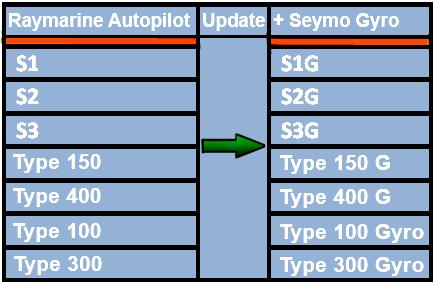
SSEYMO GYRO converts the following pilots (G) gyroscopo
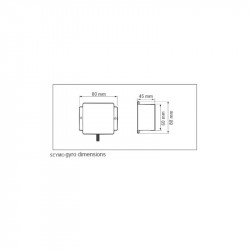
Dimensions:
Incudes:

Videos
Documentation:





Update Seymo Gyro:
Year/Versión:
2010/V1.01,
2011/V1.02,
2012/V2.00,
2013/V2.01,
2014/V2.02,
2015/V2.03,
2016/V2.04,
2018/V2.05,
2021/V3.06

Funciona fenomenal, probado con spy y noto una gran mejoría
The Ray Gyro is extremely easy to install. In about 10 minutes time you transform your system into a wave action ready fighting machine
muy contento , funciona muy bien he notado un gran cambio en elmantenimiento del rumbo
I fitted it on our older Type 300 autopilot, which greatly improved its ability to steer straight in big seas.
Le résultat est parfait avec le produit Seymo Nautica.
Seymo angular gyro, for autopilots, with its advanced design INS (inertial navigation system), is an important part of auto navigation systems and inertial guidance in motorboats and sailboats. The instrument of this inertial guidance system includes gyroscopes and accelerometer.


